غیر مطابقت پذیر موٹریں جو الیکٹرک موٹرز کے طور پر کام کرتی ہیں۔کیونکہ روٹر وائنڈنگ کرنٹ انڈسڈ ہوتا ہے، اس لیے اسے انڈکشن موٹر بھی کہا جاتا ہے۔اسینکرونس موٹرز سب سے زیادہ استعمال شدہ اور ہر قسم کی موٹروں میں سب سے زیادہ مانگی جاتی ہیں۔مختلف ممالک میں بجلی سے چلنے والی تقریباً 90% مشینیں غیر مطابقت پذیر موٹریں ہیں، جن میں سے چھوٹی غیر مطابقت پذیر موٹریں 70% سے زیادہ ہیں۔بجلی کے نظام کے کل بوجھ میں، غیر مطابقت پذیر موٹروں کی بجلی کی کھپت کا کافی تناسب ہے۔چین میں، غیر مطابقت پذیر موٹروں کی بجلی کی کھپت کل بوجھ کا 60 فیصد سے زیادہ ہے۔
غیر مطابقت پذیر موٹر کا تصور
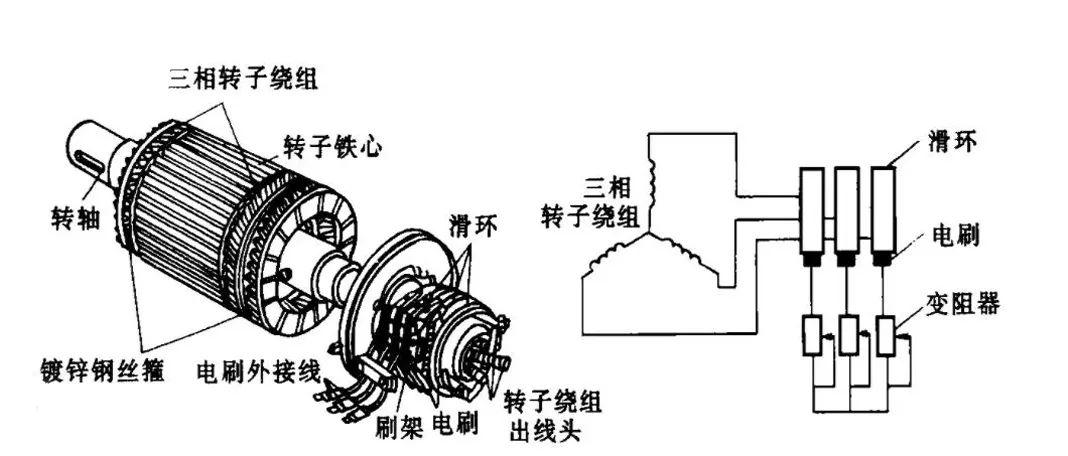
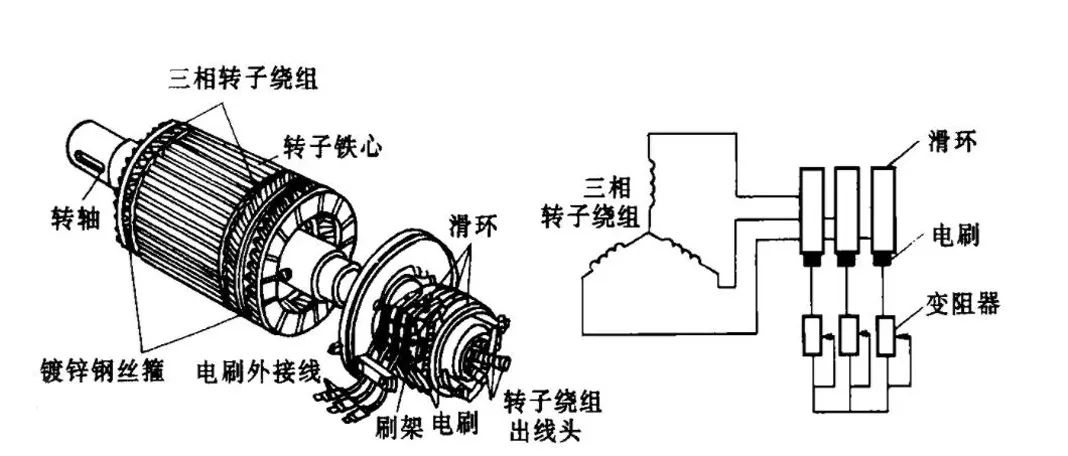
ایک غیر مطابقت پذیر موٹر ایک AC موٹر ہے جس کی لوڈ کی رفتار سے منسلک گرڈ کی فریکوئنسی کا تناسب ایک مستقل قدر نہیں ہے۔انڈکشن موٹر ایک غیر مطابقت پذیر موٹر ہے جس میں وائنڈنگز کا صرف ایک سیٹ پاور سپلائی سے منسلک ہوتا ہے۔غلط فہمی اور الجھن پیدا نہ کرنے کی صورت میں، انڈکشن موٹرز کو عام طور پر غیر مطابقت پذیر موٹرز کہا جا سکتا ہے۔IEC کا معیار یہ بتاتا ہے کہ "انڈکشن موٹر" کی اصطلاح درحقیقت بہت سے ممالک میں "اسینکرونس موٹر" کے مترادف کے طور پر استعمال ہوتی ہے، جب کہ دوسرے ممالک ان دو تصورات کی نمائندگی کرنے کے لیے صرف "غیر مطابقت پذیر موٹر" کی اصطلاح استعمال کرتے ہیں۔
پوسٹ ٹائم: اگست 08-2022